KITTI 数据集 ¶
+约 707 个字 41 行代码 预计阅读时间 3 分钟
+Abstract
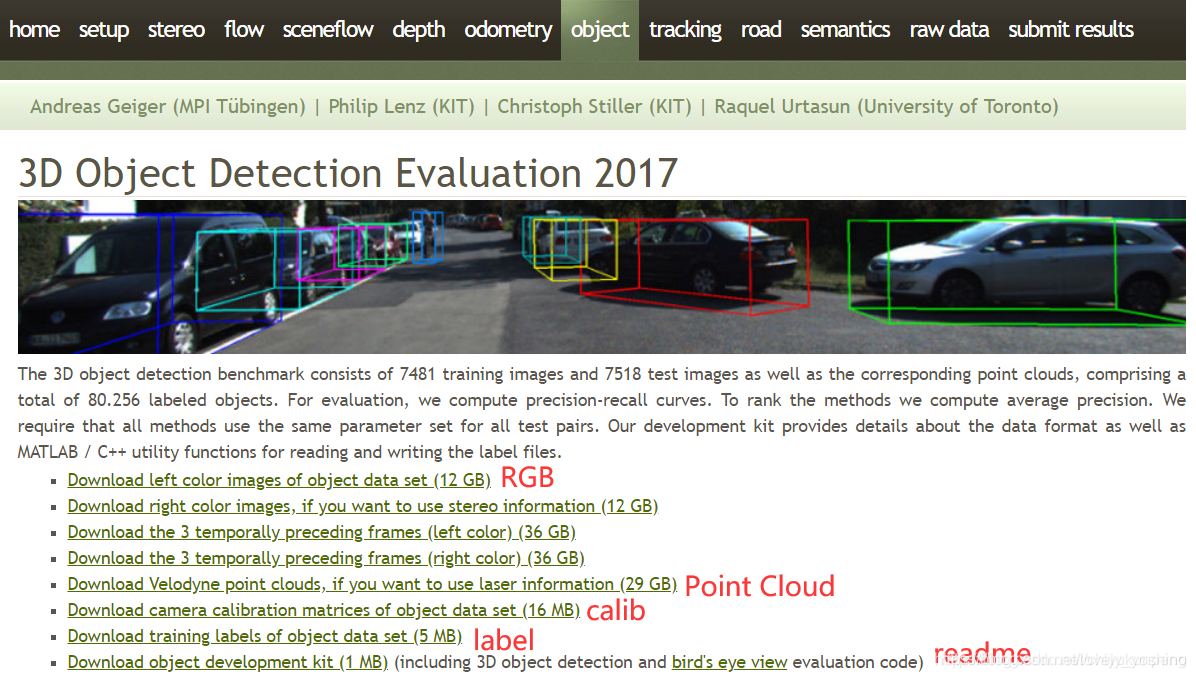
+该数据集用于评测立体图像 (stereo),光流 (optical flow),视觉测距 (visual odometry),3D 物体检测 (object detection) 和 3D 跟踪 (tracking) 等计算机视觉技术在车载环境下的性能。
+KITTI 包含市区、乡村和高速公路等场景采集的真实图像数据,每张图像中最多达 15 辆车和 30 个行人,还有各种程度的遮挡与截断。
+整个数据集由 389 对立体图像和光流图,39.2 km 视觉测距序列以及超过 200k 3D 标注物体的图像组成 [1] ,以 10Hz 的频率采样及同步。总体上看,原始数据集被分类为Road , City , Residential , Campus和 Person。对于 3D 物体检测,label 细分为 car, van, truck, pedestrian, pedestrian(sitting), cyclist, tram 以及 misc 组成。
数据集格式 ¶
+
结构 ¶
+data
+├── kitti
+│ ├── ImageSets
+│ ├── testing
+│ │ ├── calib
+│ │ ├── image_2
+│ │ ├── velodyne
+│ ├── training
+│ │ ├── calib
+│ │ ├── image_2
+│ │ ├── label_2
+│ │ ├── velodyne
+│ │ ├── planes (optional)
+-
+
- image_2 即 2 号彩色相机所拍摄的图片(.png
) ;
+ - calib 对应每一帧的外参(.txt
) ;
+ - label_2 是每帧的标注信息(.txt
) ;
+ - velodyne 是 Velodyne64 所得的点云文件(.bin) +
标定文件 ¶
+KITTI 提供了三种标定文件,不需人工转换。
+-
+
calib_cam_to_cam
+calib_imu_to_velo
+calib_velo_to_cam
+
ImageSets¶
+-
+
- train.txt:训练集 列表信息 +
- test.txt:测试集 列表信息 +
- val.txt:验证集 列表信息 +
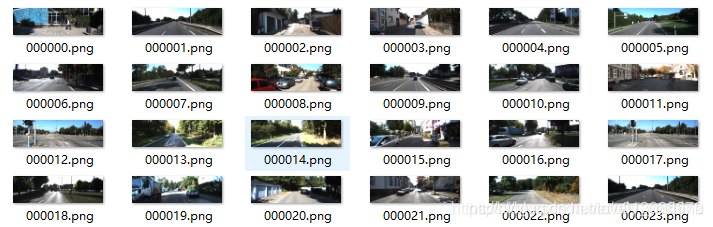
image 文件 ¶
+image 文件以 8 位 PNG 格式存储,如下所示:
+
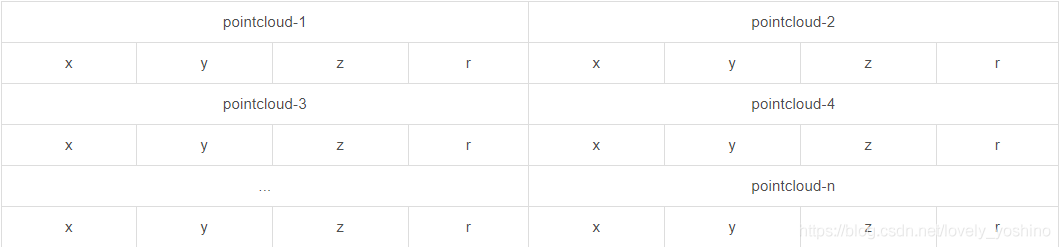
velodyne 文件 ¶
+velodyne 文件是激光雷达的测量数据(绕其垂直轴(逆时针)连续旋转
7b14 4642 1058 b541 9643 0340 0000 0000
+46b6 4542 1283 b641 3333 0340 0000 0000
+4e62 4042 9643 b541 b072 0040 cdcc 4c3d
+8340 3f42 08ac b541 3bdf ff3f 0000 0000
+e550 4042 022b b841 9cc4 0040 0000 0000
+10d8 4042 022b ba41 4c37 0140 0000 0000
+3fb5 3a42 14ae b541 5a64 fb3f 0000 0000
+7dbf 3942 2731 b641 be9f fa3f 8fc2 f53d
+cd4c 3842 3f35 b641 4c37 f93f ec51 383e
+dbf9 3742 a69b b641 c3f5 f83f ec51 383e
+2586 3742 9a99 b741 fed4 f83f 1f85 6b3e
+ .
+ .
+ .
+点云数据以浮点二进制文件格式存储,每行包含 8 个数据,每个数据由四位十六进制数表示(浮点数
calib 文件 ¶
+calib 文件是相机、雷达、惯导等传感器的矫正数据。以 "000001.txt" 文件为例,内容如下:
+P0: 7.215377000000e+02 0.000000000000e+00 6.095593000000e+02 0.000000000000e+00 0.000000000000e+00 7.215377000000e+02 1.728540000000e+02 0.000000000000e+00 0.000000000000e+00 0.000000000000e+00 1.000000000000e+00 0.000000000000e+00
+P1: 7.215377000000e+02 0.000000000000e+00 6.095593000000e+02 -3.875744000000e+02 0.000000000000e+00 7.215377000000e+02 1.728540000000e+02 0.000000000000e+00 0.000000000000e+00 0.000000000000e+00 1.000000000000e+00 0.000000000000e+00
+P2: 7.215377000000e+02 0.000000000000e+00 6.095593000000e+02 4.485728000000e+01 0.000000000000e+00 7.215377000000e+02 1.728540000000e+02 2.163791000000e-01 0.000000000000e+00 0.000000000000e+00 1.000000000000e+00 2.745884000000e-03
+P3: 7.215377000000e+02 0.000000000000e+00 6.095593000000e+02 -3.395242000000e+02 0.000000000000e+00 7.215377000000e+02 1.728540000000e+02 2.199936000000e+00 0.000000000000e+00 0.000000000000e+00 1.000000000000e+00 2.729905000000e-03
+R0_rect: 9.999239000000e-01 9.837760000000e-03 -7.445048000000e-03 -9.869795000000e-03 9.999421000000e-01 -4.278459000000e-03 7.402527000000e-03 4.351614000000e-03 9.999631000000e-01
+Tr_velo_to_cam: 7.533745000000e-03 -9.999714000000e-01 -6.166020000000e-04 -4.069766000000e-03 1.480249000000e-02 7.280733000000e-04 -9.998902000000e-01 -7.631618000000e-02 9.998621000000e-01 7.523790000000e-03 1.480755000000e-02 -2.717806000000e-01
+Tr_imu_to_velo: 9.999976000000e-01 7.553071000000e-04 -2.035826000000e-03 -8.086759000000e-01 -7.854027000000e-04 9.998898000000e-01 -1.482298000000e-02 3.195559000000e-01 2.024406000000e-03 1.482454000000e-02 9.998881000000e-01 -7.997231000000e-01
+label 文件 ¶
+label 文件是 KITTI 中 object 的标签和评估数据,以 "000001.txt" 文件为例,包含样式如下:
+Truck 0.00 0 -1.57 599.41 156.40 629.75 189.25 2.85 2.63 12.34 0.47 1.49 69.44 -1.56
+Car 0.00 0 1.85 387.63 181.54 423.81 203.12 1.67 1.87 3.69 -16.53 2.39 58.49 1.57
+Cyclist 0.00 3 -1.65 676.60 163.95 688.98 193.93 1.86 0.60 2.02 4.59 1.32 45.84 -1.55
+DontCare -1 -1 -10 503.89 169.71 590.61 190.13 -1 -1 -1 -1000 -1000 -1000 -10
+DontCare -1 -1 -10 511.35 174.96 527.81 187.45 -1 -1 -1 -1000 -1000 -1000 -10
+DontCare -1 -1 -10 532.37 176.35 542.68 185.27 -1 -1 -1 -1000 -1000 -1000 -10
+DontCare -1 -1 -10 559.62 175.83 575.40 183.15 -1 -1 -1 -1000 -1000 -1000 -10
+-
+
- 第 1 列(字符串
) :代表物体类别(type)
+ - 第 2 列(浮点数
) :代表物体是否被截断(truncated)
+ - 第 3 列(整数
) :代表物体是否被遮挡(occluded)
+ - 第 4 列(弧度数
) :物体的观察角度(alpha)
+ - 第 5~8 列(浮点数
) :物体的 2D 边界框大小(bbox)
+ - 第 9~11 列(浮点数
) :3D 物体的尺寸(dimensions)
+ - 第 12-14 列(整数
) :3D 物体的位置(location)
+ - 第 15 列(弧度数
) :3D 物体的空间方向(rotation_y)
+ - 第 16 列(整数
) :检测的置信度(score) (只有测试集中有)
+
Reference¶
+ ++
+ 创建日期: + 2024年5月29日 20:43:37 + +